EQUILIBRIUM MORPHOLOGIES
//project_ behavioral fabrication seminar, ITECH
//date_ september 2024
//team_ alina turean, samuel leder, mathias maierhofer, tobias schwin
//methods_ arduino, unity
//paper_ *link to paper
Equilibrium Morphologies presents a cyber-physical form-finding method for that seeks the equilibrium state of fabric structures through sensorial modeling and emergent behavior of interacting forces. The developed design interface enables users to swiftly explore numerous fabric morphologies in their equilibrium, suggesting intuitive tangible means of design communication.

//feedback_scheme
This project`s approach requires a unique understanding where design input and physical output are not executed as sequential, separated steps, but instead as cyclical, interrelated processes actuated through feedback. Embedded sensors detect material disturbances, such as residual forces, and subsequently trigger corrective action to restore a stable equilibrium state.
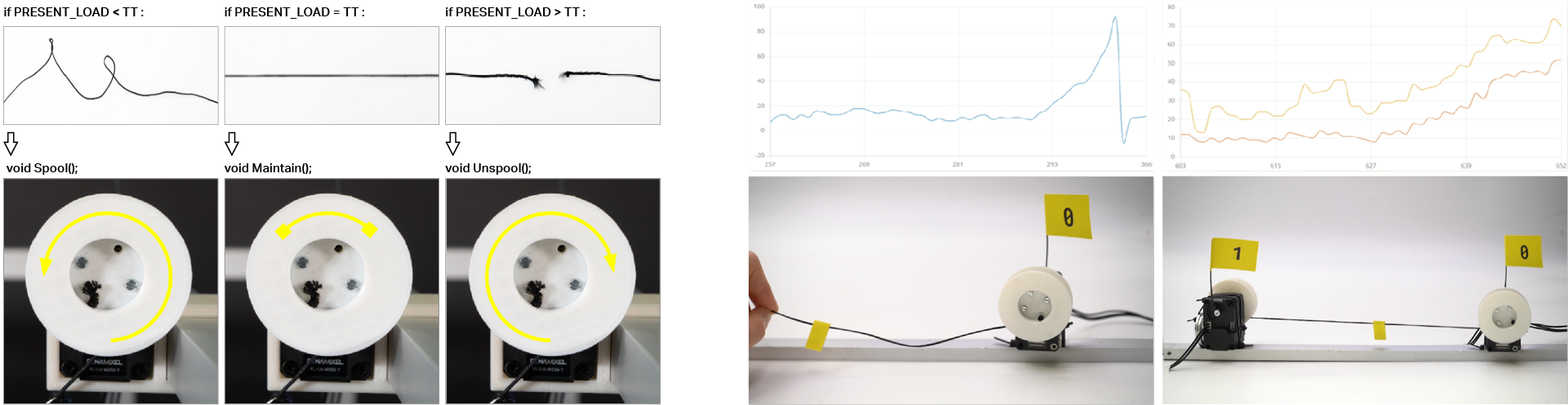 //tension-to-action-functions & force-plotting
//tension-to-action-functions & force-plotting
The Tension-Threshold (TT) is a material-specific value that defines the ideal range of torque values. Only if every element is under pure tension, structural integrity is provided and the membrane is able to retain its shape.

//erection_process
Contrary to physical methods of form-finding that only served for representational purposes, “Equilibrium Morphologies” interprets the idea of form-finding rather as a process of playful exploration and learning how tension-active structures behave in an ever-changing environment.
Contrary to physical methods of form-finding that only served for representational purposes, “Equilibrium Morphologies” interprets the idea of form-finding rather as a process of playful exploration and learning how tension-active structures behave in an ever-changing environment.
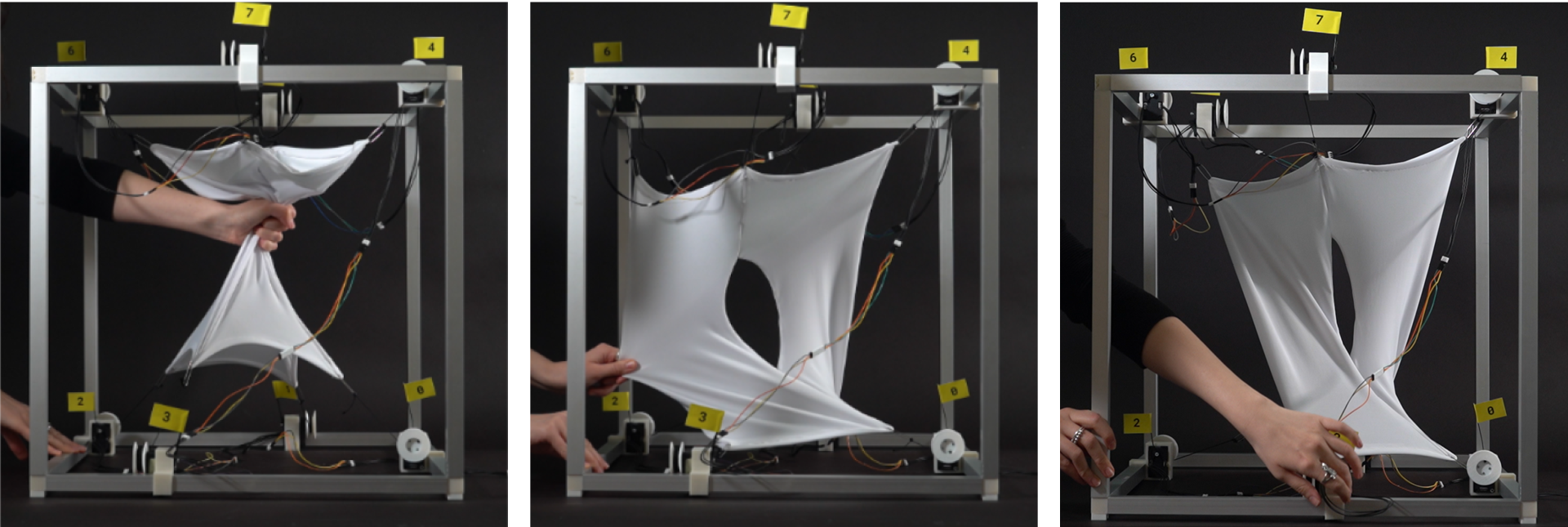
//manipulations
The suspended fabric serves as the tangible user interface that registers local manipulations and enables communication between all eight motors through its elastic material behavior. Together with the maneuverable anchor points, the tangible user interface provides opportunities to create a multitude of different support conditions, resulting in various equilibrium morphologies within seconds.
The suspended fabric serves as the tangible user interface that registers local manipulations and enables communication between all eight motors through its elastic material behavior. Together with the maneuverable anchor points, the tangible user interface provides opportunities to create a multitude of different support conditions, resulting in various equilibrium morphologies within seconds.