3.2 INVERSE KINEMATICS SOLVER FOR ROBOTIC ARMS
*coming soon*
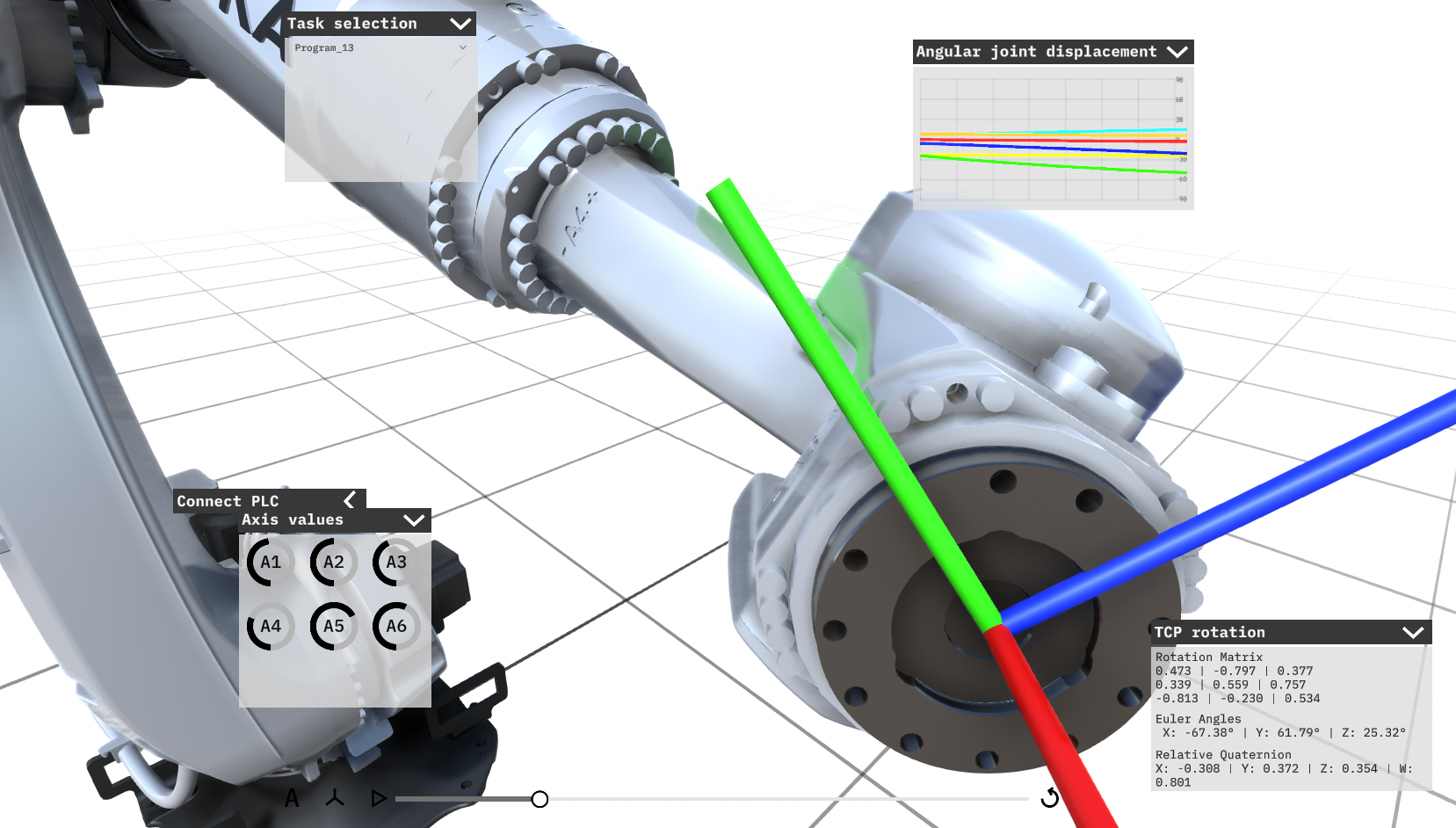
This page documents the implementation of an Inverse Kinematics (IK) solver for robotic arms in Unity. The motivation is to merely share my interest in the underlying mathematical principles for joint angles computation and motion trajectories planning, while also providing a tool for foundational offline robot programming, toolpath simulation and motion planning. The solver is designed for industrial arms with 6 degrees-of-freedom and spherical wrists and is implemented within the Unity game engine.
Unity project can be shared upon request.
Core topics include:
1. Rotational Kinematics: Euler Angles, rotation matrices, quaternions
2. Robot Configuration and Constraints: Degrees of freedom, local rotation axes, cumulative rotations, joint limits
3. Computing Wirst Position and Orientation
4. Homogeneous Transformation and Euler Angle Decomposition
5. Motion Trajectory Logics & Rotation Interpolations
6. Case studies